
Na nossa 26ª sessão, os alunos enfrentaram um desafio emocionante: programar um robô no Open Roberta para percorrer um circuito repleto de quadrados coloridos, reagindo às cores de forma inteligente!
O Desafio
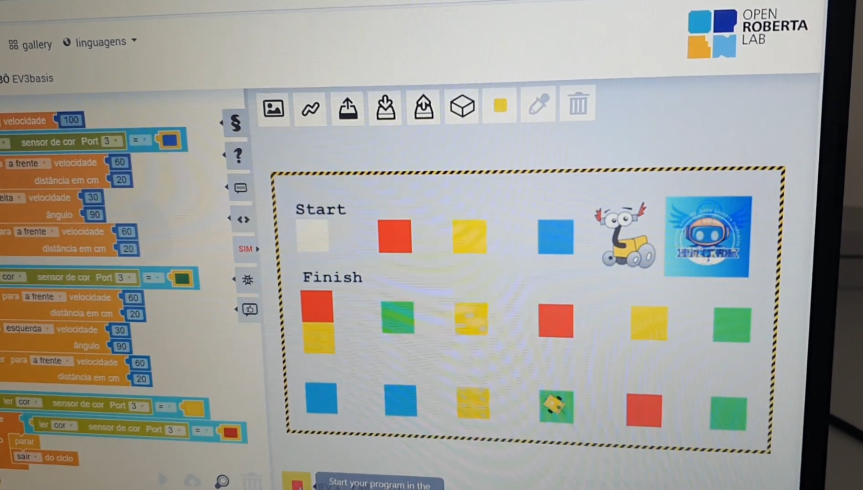
O robô tinha que:
Virar à direita ao detetar um quadrado azul;
Virar à esquerda ao encontrar um quadrado verde;
Parar apenas quando avistasse um quadrado amarelo, seguido imediatamente por um vermelho.
A Solução: Sensor de Cor e Condições “Se”
Para resolver o problema, os alunos utilizaram o sensor de cor do robô no Open Roberta, que permitiu identificar as diferentes cores do percurso. A leitura do sensor foi avaliada dentro de condições “Se”, fazendo com que o robô tomasse decisões em tempo real:
Se a cor lida fosse azul → virar à direita;
Se a cor lida fosse verde → virar à esquerda;
Se a cor lida fosse amarelo, seguida de vermelho → parar (a implementar na próxima sessão).
Foi fascinante ver como o robô interpretou os dados do sensor e reagiu conforme programado, demonstrando a importância da lógica condicional na robótica!
Colaboração eTwinning Code4Kids
Este mesmo desafio está a ser realizado pelos nossos parceiros do projeto eTwinning Code4Kids! Podem acompanhar o desenvolvimento do projeto e ver as suas soluções no blog oficial em:
👉 https://agrcanelas.edu.pt/blogs/code4kids/
O Que Ficou Por Resolver?
A parte final do desafio — a paragem do robô ao detetar a sequência amarelo + vermelho — ainda precisa de alguns ajustes. Mas não se preocupem! Este será o nosso ponto de partida na próxima sessão, onde vamos aprimorar o código para garantir uma conclusão perfeita do percurso.
Próximos Passos
Fiquem ligados! A programação, a exploração e a inovação continuam nas próximas sessões. Mal podemos esperar para ver as diferentes abordagens que surgirão, tanto no nosso clube como no projeto Code4Kids!
Vamos continuar a programar, a explorar e a inovar juntos! 🚀🤖
#Programação #Robótica #OpenRoberta #SensoresDeCor #LógicaCondicional #eTwinning #Code4Kids

Professora de Informática na Escola Secundária de Canelas desde 2009.
Coordenadora do Clube de Programação e Robótica.